We introduce Marginalized Bundle Adjustment (MBA), a bundle-adjustment objective tailored to monocular depth maps. MBA registers monocular depth maps into world coordinate. It accounts mono-depthmaps' high variance with its density. Excitingly, we show that monocular depth maps are already accurate enough to achieve state-of-the-art results on both small- and large-scale Structure-from-Motion and camera relocalization tasks.

MBA formulates the mono-depth's projective residual as an error distribution R={r}. Its forward function is indexing the Cumulative-Distribution-Function (CDF) of residual distribution R. Its backward function is indexing the Probability-Distribution-Function (PDF) of residual distribution R. The Bundle-Adjustment operates to maximize the Area-Under-the-Curve (AUC) of CDF function.
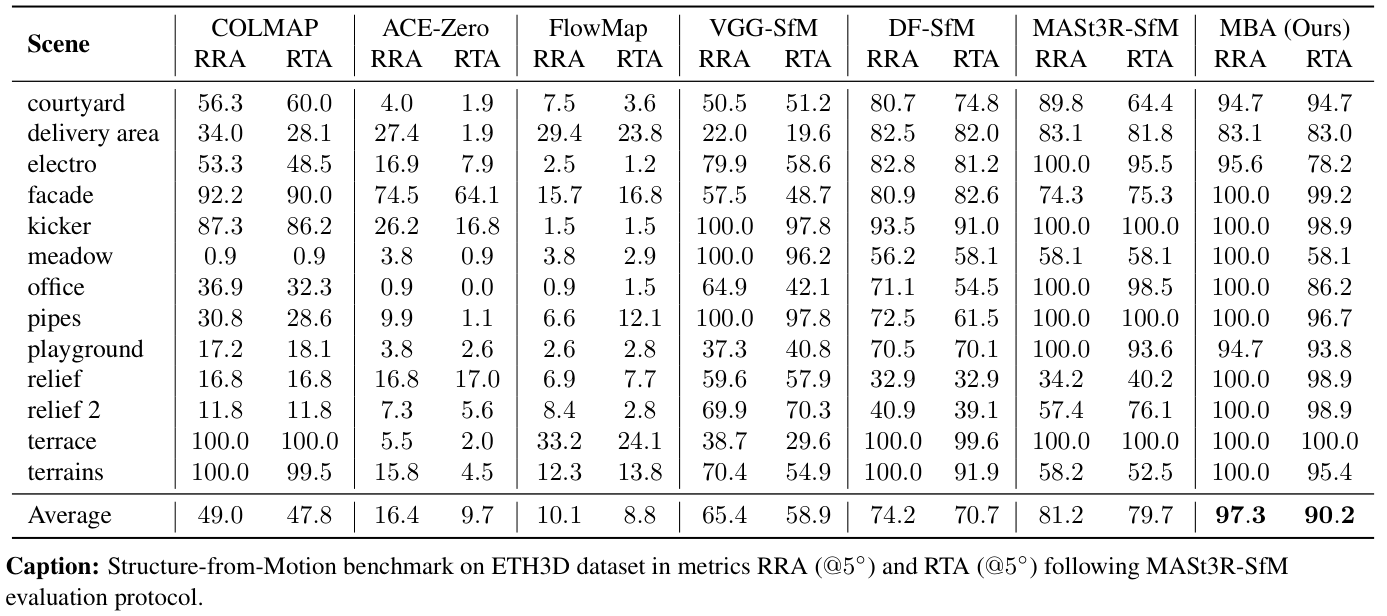
Structure-from-Motion: ETH3D
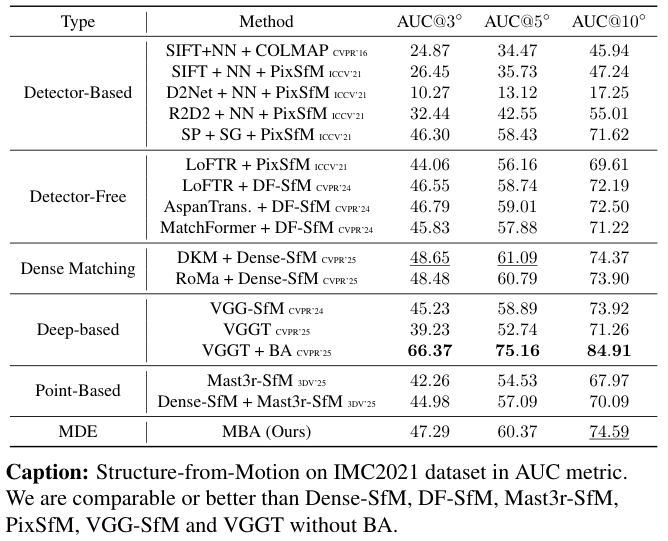
Structure-from-Motion: IMC
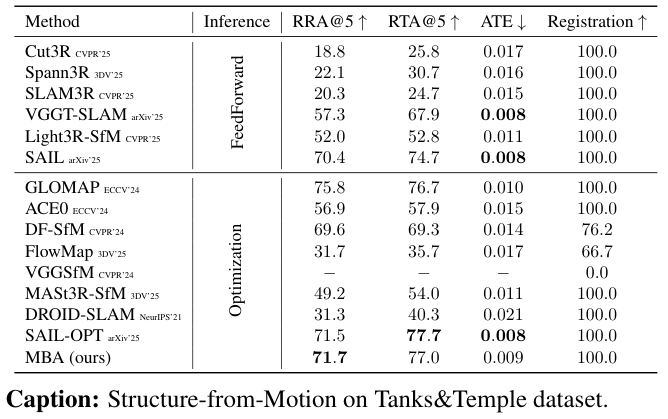
Structure-from-Motion: TNT
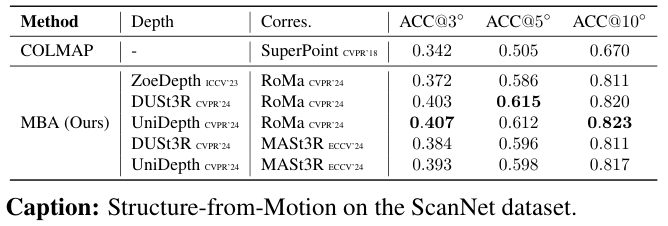
Structure-from-Motion: ScanNet

Structure-from-Motion: Fast-Map Comparison
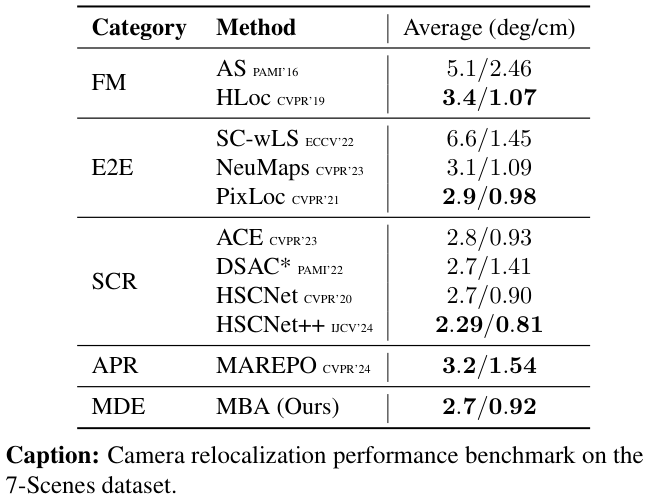
Camera Relocalization: 7-Scenes
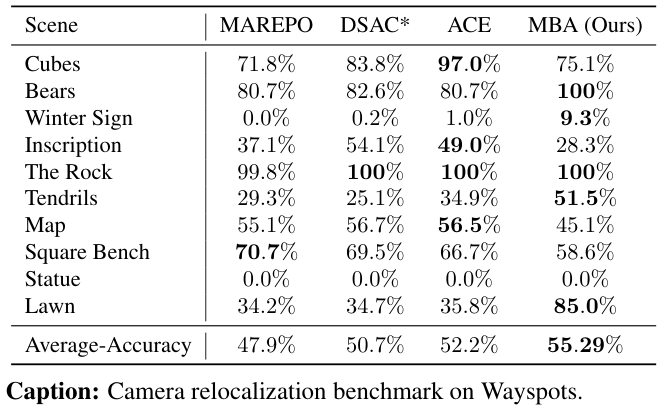
Camera Relocalization: Wayspots

Structure-from-Motion at ScanNet

Structure-from-Motion at ETH3D



Structure-from-Motion at IMC2021

Camera Relocalization at SevenScenes
Camera Relocalization at Wayspots
@inproceedings{zhu2026mba,
title={Marginalized Bundle Adjustment: Multi-View Camera Pose from Monocular Depth Estimates},
author={Zhu, Shengjie and Abdelkader, Ahmed and Matthews, Mark J. and Liu, Xiaoming and Chu, Wen-Sheng},
booktitle={International Conference on 3D Vision (3DV)},
year={2026}
}